-
News Message
机器人运动控制算法4
- by wittx 2020-06-07
这一章主要描述力(力矩)与运动的关系。运动是什么?牛顿给我们得回答是位置、速度(角速度)与加速度(角加速度),那力就更不用多说了,两者通过什么关系在一起呢?当然是牛顿第二定律了。
第1小节 加速度定义以及计算
在第二章中介绍了线速度的概念,与线速度一样,这里定义线加速度,
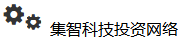
Q点线加速度在B系中的结果在A系中表达为:
在第二章中关于两坐标系不重合的情况中,线速度的表示为

等式两侧对时间求导,得
角加速度也同线加速度具有相似的定义
若A系与C系之间是通过B系联结的,可知
等式左右同时对时间求导,得
第2小节 惯性张量
由于实际的机器人是含有重量的,因此在转动的过程中,需要考虑机器人的惯性张量(表征物体质量分布)。
上图表示一个刚体,坐标系建立在刚体上,惯性张量可以在任意坐标系中定义,坐标系{A}中的惯性张量可用
![[公式]](/images/download/1591509795295_62100.png) 矩阵来表示,
矩阵来表示,矩阵中主对角线中的元素称为惯量矩,其余元素称为惯量积,定义分别为
式中刚体由单元dv组成,其密度为
![[公式]](/images/download/1591509795492_77441.png) ,每个单元的位置由矢量
,每个单元的位置由矢量 ![[公式]](/images/download/1591509795537_95455.png) 确定。可以看出惯性张量的矩阵是一个实对称矩阵,因此可以对其进行对角化,即
确定。可以看出惯性张量的矩阵是一个实对称矩阵,因此可以对其进行对角化,即也就是说,无论刚体是怎样的形状,无论刚体上的坐标系是怎样建立的,都会有一个只存在惯量矩而惯量积等于0的坐标系,R代表姿态矩阵。并且刚体坐标系建立得方法不同会导致其惯性张量矩阵得不同,以因此需要了解一下惯性张量矩阵得转换问题,也就是平行移轴定理。
平行移轴定理描述了一个以刚体质心为原点得坐标系平移到另一个坐标系时惯性张量得变换关系,假设{C}是以刚体质心为原点的坐标系,{A}为任意平移后的坐标系,则平行移轴定理为,
矩阵形式为
其中,
![[公式]](/images/download/1591509795857_85677.png) 表示
表示 ![[公式]](/images/download/1591509795933_71409.png) 的单位矩阵,
的单位矩阵,![[公式]](/images/download/1591509795973_91633.png) 表示质心相对于{A}系得位置。
表示质心相对于{A}系得位置。第3小节 牛顿-欧拉法
如图所示,空间中刚体质心处作用一外力F与外力矩N,刚体产生运动。
牛顿方程的描述为
欧拉方程的描述为

(角)加速度的推导也跟(角)速度的推导过程一样。
对于旋转轴来说,在讲角速度的时候,有公式
对上述公式求一阶导,得
这里我一直有一个疑问,在变化那都{i+1}坐标系后,等式右侧的第2项少了
![[公式]](/images/download/1591509796395_75934.png) ,也就是最后一行公式的红色部分,这个红色变量是没有的,我不清楚是怎么没有的,如果有小伙伴知道,希望可以帮我解惑,谢谢了。
,也就是最后一行公式的红色部分,这个红色变量是没有的,我不清楚是怎么没有的,如果有小伙伴知道,希望可以帮我解惑,谢谢了。针对旋转轴是不存在柯氏加速度和相对加速度的,因此线加速度为
对于平移轴来说,角加速度表示为
线加速度为

同样的道理,可以得到每个连杆质心的线加速度,由于每个连杆质心坐标系相对于其连杆坐标系固定不变,因此不分旋转轴与平移轴的情况。
计算出连杆质心的加速度后,就可以计算连杆的惯性力与惯性力矩
这一部分力与力矩的分析和静力分析一样,只不过增加了惯性力与惯性力矩,
根据旋转轴与平移轴分类,若想要产生预期的运动,则作用在电机上的力或力矩分别为
第4小节 例题分析
还是拿前一章的例子来说。已知条件,
首先推导速度与加速度,

第1杆件的质心对{1}系的加速度,

根据质心得加速度以及前面推导杆件的速度与加速度,可知惯性力与惯性力矩为
按照以上的方法,

第2杆件的质心对{2}系的加速度,

则第2杆件的惯性力与惯性力矩为,
接下来计算力与力矩的部分,

最后,我们就可以算出每个轴上的电机输出力矩的大小,
这个例子也是我在林沛群老师的课件上找到的,大家有不明白的地方可以去B站搜索。欢迎各位小伙伴留言、讨论与分享。
Share Http URL: http://www.wittx.cn/get_news_message.do?new_id=279

Best Last Month
Information industry by wittx
Electronic electrician by wittx
Computer software and hardware by wittx

Information industry by wittx
Information industry by wittx

Information industry by wittx
Information industry by wittx
Information industry by wittx

Information industry by wittx

Information industry by wittx



































